 Português
Português


CARACTERÍSTICAS DO MOTOR
■ Características do motor de indução
1 、 Geralmente, Micro Motor de Indução refere-se ao motor girado pela indução. Motor de indução depende de capacitor e eletromagnetismo ao iniciar e girar. Embora seu torque de partida não seja muito alto, possui uma estrutura simples, alta eficiência e pode girar continuamente.
2 、 O motor monofásico tem sentido reverso ao de rotação quando operado. Pis muda a direção de rotação do motor monofásico somente após parar o motor.
3 、 Motor trifásico depende de alimentação trifásica. Ele tem uma alta eficiência e pode obter um alto torque de partida.
■ Características do motor reversível
1 、 O motor reversível tem um freio de fricção na parte traseira do corpo do motor, que é projetado para aplicações onde a reversão de direção é freqüentemente necessária. Para o freio de fricção, verifique o Desenho 1. A umidade com mola impacta o disco de freio giratório e alimenta com prensa contínua. As funções do freio de fricção são as seguintes:

2 、 O torque de manutenção ou mais do freio de fricção e sobrecurso estão listados na tabela 1. É apenas para referência. Pois vai mudar de acordo com o período de rotação e também com a temperatura. Observe também que o torque pode ser um pouco menor do que o listado na tabela ao ser operado inicialmente.
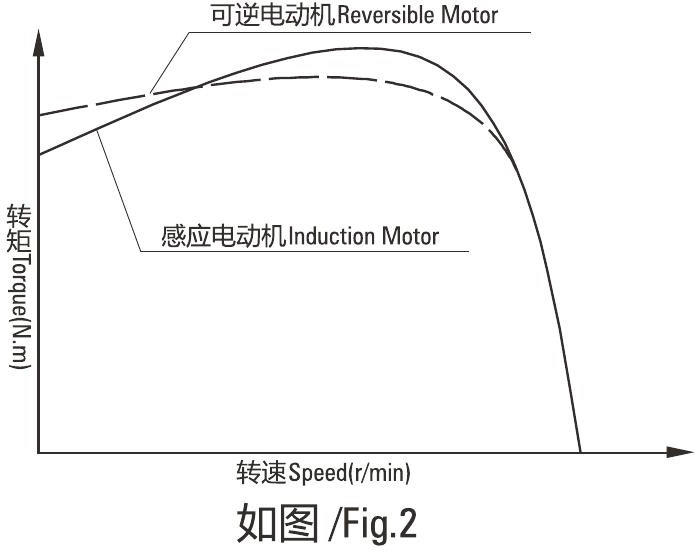
3 、 O motor reversível, assim como o motor de indução, é acionado pelo capacitor e tem a mesma característica de torque do motor de indução. Mas o motor reversível é projetado com um torque de partida mais alto para aumentar os recursos de reversão instantânea. Por favor, verifique o desenho 2.
■ Tabela 1. Manter o torque e ultrapassar
| Estágio | Tamanho | Resultado | Modelo de motor | Keep Torque | Ultrapassado | |
| mm | W | N.cm | Kgf.cm | Ciclos | ||
| Sing-Estágio | 60 | 6 | 2RK6 | 0.5 | 0.05 | 4 |
| 70 | 15 | 3RK15 | 1.3 | 0.13 | 5 | |
| 80 | 25 | 4RK25 | 1.5 | 0.14 | 5 | |
| 90 | 40 | 5RK40 | 4.0 | 0.40 | 6 | |
| 60 | 5RK60 | |||||
| 90 | 5RK90 | |||||
| 120 | 5RK120 | |||||
■ Características do Motor com Freio Eletromagnético do Tipo Ativado Desligado
1 、 Estrutura e Princípio de Operação
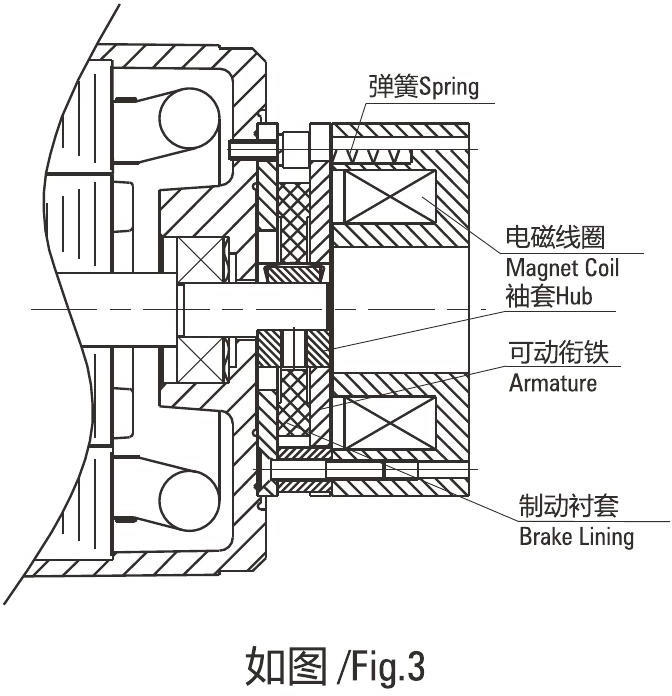
A Tabela 3 é a estrutura do Motor com Freio Eletromagnético. Produzimos o tipo ativado com energia desligada. Exercendo a tensão no enrolamento, ele magnetizará a armadura pressionada pela mola. O motor estará em um estágio de rotação, quando ocorrer uma folga entre a armadura e o aro do freio. Uma vez que a tensão do enrolamento é cortada, sob a influência da mola, a armadura pressiona o aro do freio, o que criará uma força de frenagem. Então o motor para.
2 、 As características do freio eletromagnético
É um freio eletromagnético do tipo desligado com alimentação CA que é conectado diretamente ao motor. Ele irá parar de piscar e manter a carga quando a fonte for desligada. Ele manterá o torque entre 0,05-2,0 N.m. É especialmente adequado para o freio de segurança em caso de desligamento inconsciente. O eletromagnético pode mudar sua direção com freqüência. Pode ser interrompido 6 vezes por minuto. Mas certifique-se de que dura 3 segundos ou mais.
Depois de definirmos um circuito de comutação no freio, ele pode compartilhar a fonte de alimentação com o motor.
※ O valor é padrão. Será mudança em condições diferentes. Quando realmente usado, certifique-se de tornar a temperatura da superfície do motor inferior a 90 ° C.
3 Os recursos para o tempo de início e tempo de frenagem
O tempo de partida significa o tempo para o tempo de partida do motor mais o tempo de liberação do freio eletromagnético. O tempo de frenagem significa o tempo desde o corte de energia até o momento da parada completa do motor. O tempo de ultrapassagem, tempo de partida e tempo de frenagem serão diferentes de acordo com as diferentes aplicações.
■ Tabela 2. Freio eletromagnético (tipo ativado por desligamento)
| Phase | Saída de tamanho | Tensão V | Frequência Hz | Atual A | Entrada W | Keep Torque | Ultrapassado | ||
| MILÍMETROS | W | N.cm | Kgf.cm | Ciclos | |||||
| 1 fase | 70 | 15 | 110 120 220 230 | 50/60 | 0.091 | 8.2 | 0.5 | 50 | 3.5 |
| 80 | 25 | ||||||||
| 90 | 40 | ||||||||
| 60 | |||||||||
| 0.111 | 10.0 | 1.0 | 100 | ||||||
| 90 | |||||||||
| 120 | |||||||||
| 100 | 120 | ||||||||
| 140 | |||||||||
| 200 | 0.144 | 13.0 | 2.0 | 200 | |||||
| 3 fases | 60 | 6 | 220 ~ 230 | 50/60 | 0.073 | 6.6 | 0.25 | 25 | |
| 70 | 15 | 380 ~ 415 | 0.037 | 6.6 | 0.25 | 25 | |||
| 80 | 25 | 200 ~ 230 380 ~ 415 | 0.091 | 8.2 | 0.5 | 50 | |||
| 90 | 40 | ||||||||
| 60 | 0.046 | 8.2 | 0.5 | 50 | |||||
| 90 | 200 ~ 230 380 ~ 415 | 0.111 | 10.0 | 1.0 | 100 | ||||
| 120 | |||||||||
| 100 | 120 | 0.056 | 10.0 | 1.0 | 100 | ||||
| 140 | |||||||||
| 200 | 200 ~ 230 380 ~ 415 | 0.144 | 13.0 | 2.0 | 200 | ||||
| 0.144 | 13.0 | 2.0 | 200 | ||||||
■ Os recursos do motor de controle de velocidade
1 、 É uma unidade do controlador e do motor. Ele só precisa se conectar uma vez. A velocidade pode ser facilmente ajustada pelo potenciômetro. O controlador é fixo com malha de controle de velocidade, capacitor, ativação de velocidade e etc. Não há função de parada instantânea na unidade.
2 、 O controlador pode fazer a velocidade variável entre 90-1350 rpm a 50 Hz e 90-1650 rpm a 60Hz.
3 、 Por favor, não opere o motor em baixa velocidade por muito tempo evitando superaquecimento.











